Read More










Ayra Wang
Engineering researchers from the Hong Kong University of Science and Technology have developed the world's smallest multifunction biomedical robot that is capable of imaging, high-precision motions and myriad operations such as sampling, drug delivery and laser ablation.
With a slim profile of 0.95 millimeters, the robot - developed by Shen Yajing, an associate professor at the department of electronic and computer engineering, and his team - is 60 percent smaller than current models.
Having achieved the crucial attributes of compactness, precise navigation and visualized functional treatment, the tiny robot holds tremendous potential for clinical applications, Shen said. "Our study provides a significant solution for developing a surgical robot aimed at achieving early diagnosis and therapeutic goals in hard-to-reach areas of the body," he said.
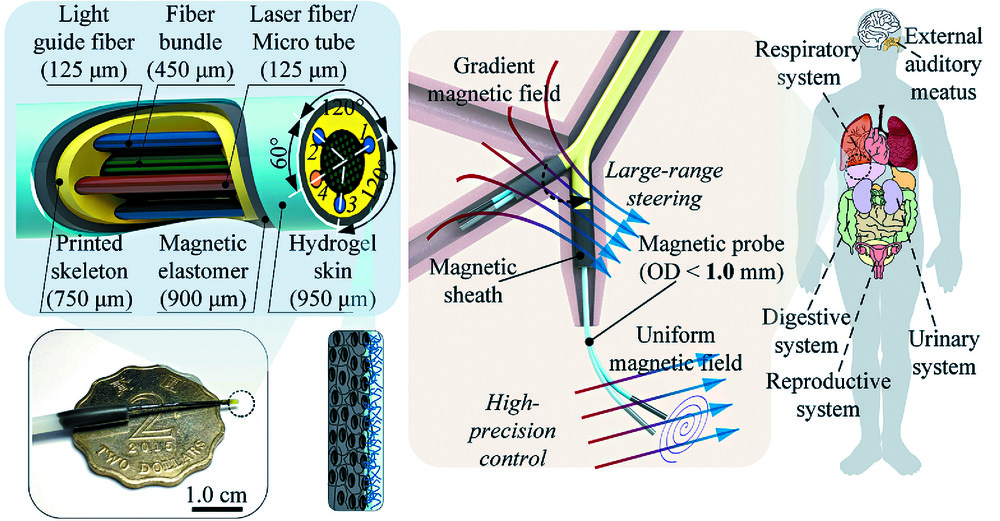
The robot comprises four major components: an optical fiber array for capturing images inside the body, a custom tool for delivering treatments in precise locations, a hollow skeleton to house the fibers and tools, and functionalized skin that enables precise control of the robot's movements.
The team used a microscale 3D printer to create the skeleton while the skin was produced via a magnetic spray technique, which keeps the robot small and allows it to glide easily during surgery.
It boasts an extended obstacle detection distance of up to some 9.4 millimeters, a tenfold improvement from theoretical limits.
It also achieves impressive motion precision - less than 30 micrometers - and can substantially widen imaging regions by 25 times the inherent view.
Successfully testing the robot's functions within in-vitro bronchial models and ex-vivo porcine lungs, the team will work to further improve the robot's features.
Their findings have recently been published in Nature Communications, a peer-reviewed scientific journal.